Millainen kamera on paras laserkeilan karakterisointiin – CMOS vs CCD
Laserkeilan profilointi on tärkeä osa lasertutkimusta, -kehitystä ja -tuotantoa, sillä se tarjoaa kriittistä tietoa laserkeilojen laadusta ja suorituskyvystä. Yksi laserkeilan profiloijan keskeisistä komponenteista on kamera, jota käytetään laserkeilan kuvien tallentamiseen. Kaikki kamerat eivät kuitenkaan sovellu yhtä hyvin laserkeilan karakterisointiin. Tässä artikkelissa tarkastelemme erilaisia kameroita, joita on saatavilla laserkeilan profilointiin, ja käsittelemme keskeisiä tekijöitä, jotka tulee ottaa huomioon kameraa valittaessa laserkeilan karakterisointia varten. Ymmärtämällä eri kameratyyppien edut ja rajoitukset voit tehdä tietoon perustuvan päätöksen siitä, mikä kamera soveltuu parhaiten juuri sinun sovellukseesi ja varmistaa laserkeilan profilointijärjestelmäsi mahdollisimman tarkat ja luotettavat tulokset.
Laserkeilojen karakterisointiin voidaan käyttää useita erilaisia kameroita, joilla kaikilla on omat etunsa ja haittansa. Yleisimpiä laserkeilan karakterisointiin käytettyjä kameroita ovat:
CCD-kamerat (Charge-Coupled Device): Nämä kamerat käyttävät CCD-anturia kuvien tallentamiseen. CCD-kamerat ovat herkkiä laajalle aallonpituusalueelle ja pystyvät tuottamaan korkearesoluutioisia kuvia. Niille on ominaista alhainen kohina, suuri dynaaminen alue ja hyvä värintoisto. CCD-kameroita käytetään yleisesti laserkeilan profiloinnissa ja muissa keilan karakterisointisovelluksissa.
CMOS-kamerat (Complementary Metal-Oxide-Semiconductor): Nämä kamerat käyttävät CMOS-anturia kuvien tallentamiseen. CMOS-kameroilla on samankaltaiset ominaisuudet kuin CCD-kameroilla, mutta ne ovat kustannustehokkaampia, kuluttavat vähemmän virtaa ja ne voidaan toteuttaa pienemmässä koossa. Ne soveltuvat erityisesti nopeaan kuvantamiseen ja suurinopeussovelluksiin.
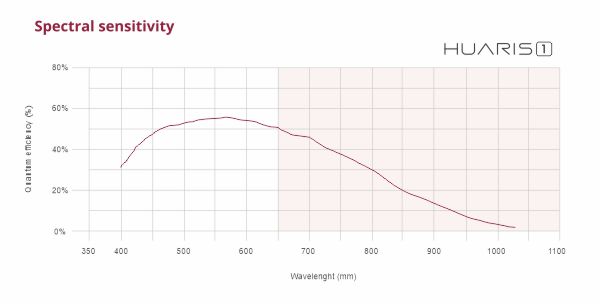
HUARIS ONE -profilerin spektrinen herkkyyskäyrä on esitetty alla olevassa kaaviossa:
The spectral sensitivity curve of HUARIS ONE profiler
ICCD-kamerat (Intensified Charge-Coupled Device): Nämä kamerat käyttävät CCD-anturia ja kuvanvahvistinta. ICCD-kamerat ovat herkkiä heikoille valaistusolosuhteille ja soveltuvat erittäin suuritehoisten laserkeilojen kuvaamiseen. Niitä käytetään yleisesti suuritehoisissa lasersovelluksissa, kuten laserleikkauksessa ja -hitsauksessa.
InGaAs-kamerat: Nämä kamerat käyttävät InGaAs-anturia, joka on erityisen herkkä lähi-infrapuna-alueen (NIR) aallonpituuksille, joita käytetään yleisesti lasersovelluksissa. Ne soveltuvat suuritehoisten keilojen mittaamiseen NIR-alueella ja niitä käytetään yleisesti kuituoptisessa tiedonsiirrossa, spektroskopiassa ja muissa vastaavissa sovelluksissa.
SWIR-kamerat (shortwave infrared): Nämä kamerat ovat herkkiä lyhytaaltoisen infrapunan (SWIR) aallonpituuksille, jotka ovat myös yleisiä lasersovelluksissa. Ne soveltuvat suuritehoisten keilojen mittaamiseen SWIR-alueella ja niitä käytetään yleisesti tunnistus- ja kuvantamissovelluksissa.
Paras kamera laserkeilan karakterisointiin riippuu sovelluksen erityisvaatimuksista, kuten laserkeilan aallonpituudesta, tehosta ja spatiaalisen resoluution tarpeesta sekä käyttöympäristöstä. Lisäksi on tärkeää huomioida tekijät kuten kustannukset, koko ja helppokäyttöisyys kameraa valittaessa.
CMOS vs. CCD – kumpi on parempi?
CMOS (Complementary Metal-Oxide-Semiconductor) ja CCD (Charge-Coupled Device) ovat kaksi erilaista kuvakennoa, joita käytetään kameroissa, myös laserkeilan karakterisointiin tarkoitetuissa. Molemmilla kennotyypeillä on omat etunsa ja haittansa, ja valinta niiden välillä riippuu sovelluksen vaatimuksista.
CCD-kennokameroita arvostetaan niiden korkean kuvanlaadun ja alhaisen kohinan vuoksi. Ne ovat herkkiä laajalle aallonpituusalueelle ja pystyvät tuottamaan korkearesoluutioisia kuvia. CCD-kennolla voidaan saavuttaa suuri dynaaminen alue ja hyvä värintoisto. Niitä käytetään yleisesti tieteellisissä ja teollisissa sovelluksissa, joissa vaaditaan erittäin hyvää kuvanlaatua. CCD-kennokamerat ovat kuitenkin yleensä kalliimpia ja kuluttavat enemmän virtaa kuin CMOS-kamerat.
CMOS-kennokamerat ovat puolestaan kustannustehokkaampia ja niiden virrankulutus on pienempi. Ne voidaan toteuttaa pienemmässä koossa, mikä tekee niistä sopivia kannettaviin ja kompakteihin sovelluksiin. Ne soveltuvat myös nopeaan kuvantamiseen ja suurinopeussovelluksiin, ja niiden teknologia mahdollistaa suuremman integraation sirulle, kuten prosessointiyksikön lisäämisen, mikä vähentää ulkoisten komponenttien tarvetta. CMOS-kennoilla voi kuitenkin olla korkeampi kohinataso ja alhaisempi kvanttihyötysuhde (QE) kuin CCD-kennoilla, mikä saattaa vaatia lisäsignaalinkäsittelyä vastaavan kuvanlaadun saavuttamiseksi.
Yhteenvetona voidaan todeta, että CCD-kennokamerat soveltuvat paremmin sovelluksiin, joissa vaaditaan erittäin korkeaa kuvanlaatua, kun taas CMOS-kennokamerat ovat parempi valinta kustannusherkkiin sovelluksiin tai tilanteisiin, joissa tarvitaan alhaista virrankulutusta ja kompaktia rakennetta.
Lasersovelluksissa CMOS-kennojen katsotaan usein kestävän paremmin vaurioita kuin CCD-kennot.
On syytä huomioida, että valinta CMOS- ja CCD-kennojen välillä ei ole aina yksiselitteinen, ja sovelluksen erityisvaatimukset, kuten aallonpituus, teho, spatiaalinen resoluutio ja tiedonsiirtonopeus, sekä kustannukset, koko ja helppokäyttöisyys tulee ottaa huomioon.
Laserkeilan karakterisointiin tarkoitettua detektorimatriisia valittaessa on useita vaihtoehtoja, mukaan lukien mustavalkoiset (monokromaattiset) ja värilliset matriisit. Valinta riippuu sovelluksen vaatimuksista.
Mustavalkoiset detektorimatriisit ovat herkkiä ultraviolettialueelta näkyvän valon kautta lähi-infrapunaan (NIR). Niitä käytetään yleisesti laserkeilan profiloinnissa ja muissa keilan karakterisointisovelluksissa, sillä ne tarjoavat korkean spatiaalisen resoluution ja hyvän herkkyyden. Ne ovat vähemmän herkkiä ympäristön hajavalolle ja reagoivat tehokkaammin lasersäteilyyn.
Värilliset detektorimatriisit ovat herkkiä useille aallonpituuksille samanaikaisesti, tyypillisesti näkyvän valon alueella, ja ne pystyvät tallentamaan tietoa valon väristä. Niitä käytetään sovelluksissa, joissa värinformaatio on tärkeää, kuten värikuvantamisessa, materiaalianalyysissä ja värisensoreissa. Ne voivat tarjota enemmän tietoa laserkeilasta, mutta ovat herkempiä ympäristön valolle. Lisäksi niiden spatiaalinen resoluutio on heikompi, minkä vuoksi niitä käytetään harvoin laserkeilan karakterisoinnissa, jossa intensiteettikartoituksen korkea tarkkuus on ratkaisevaa.
Valinta mustavalkoisen ja värillisen detektorimatriisin välillä riippuu sovelluksen vaatimuksista. Jos värinformaatio ei ole tärkeää, mustavalkoinen detektorimatriisi tarjoaa paremman herkkyyden ja spatiaalisen resoluution. Jos värinformaatio on tarpeen, värillinen detektorimatriisi on oikea valinta. Käyttöympäristö on myös huomioitava, sillä värilliset matriisit ovat herkempiä ympäristön hajavalolle.
Värisyvyys ja analogi-digitaalimuunnin
Värillisten detektorimatriisien tapauksessa värisyvyys ja kamerassa käytetty analogi-digitaalimuunnin (ADC) vaikuttavat kokonaiskuvanlaatuun ja laserkeilan mittaustarkkuuteen.
Värisyvyys, jota kutsutaan myös bittisyvyydeksi, tarkoittaa bittien määrää, joilla kunkin pikselin väri esitetään. Mitä suurempi värisyvyys, sitä enemmän värejä voidaan esittää ja sitä tarkempi värintoisto saavutetaan. Suurempi värisyvyys mahdollistaa myös laajemman dynaamisen alueen, eli kirkkaustasojen alueen, joka voidaan tallentaa kuvaan. Suurempi dynaaminen alue mahdollistaa laserkeilan tarkemman mittaamisen.
Analogi-digitaalimuunnin (ADC) on piiri, joka muuntaa analogisen signaalin digitaaliseksi esitykseksi. Kamerassa ADC muuntaa kennon tuottaman analogisen kuvasignaalin digitaaliseksi kuvaksi. ADC:n resoluutio, joka mitataan bitteinä, määrittää digitaalisten arvojen enimmäismäärän. Suurempi ADC-resoluutio tuottaa suuremman värisyvyyden ja siten tarkemman värintoiston ja dynaamisen alueen.
Kameran värisyvyys ja ADC-resoluutio vaikuttavat laserkeilan mittaustarkkuuteen. Suuremmat arvot mahdollistavat tarkemman värintoiston ja laajemman dynaamisen alueen, mikä parantaa mittaustuloksia.
On kuitenkin huomioitava, että värisyvyys ja ADC-resoluutio eivät ole ainoita kuvanlaatuun ja mittaustarkkuuteen vaikuttavia tekijöitä; myös kennon laatu, linssi ja optiikka ovat tärkeitä.
Pikselikoko ja pikseliväli – mikä on ero?
Pikselikoko ja pikseliväli ovat kaksi toisiinsa liittyvää mutta erillistä kuvakennon ominaisuutta, joita käytetään muun muassa laserkeilan karakterisointikameroissa.
Pikselikoko tarkoittaa yksittäisen pikselin fyysistä kokoa kuvakennolla. Se mitataan yleensä mikrometreinä (µm) ja voi vaihdella muutamasta mikrometristä korkean resoluution kennoissa useisiin kymmeniin mikrometreihin matalamman resoluution kennoissa. Suurempi pikselikoko tarkoittaa yleensä parempaa valonkeräyskykyä, mikä parantaa herkkyyttä ja signaali-kohinasuhdetta (SNR).
Pikseliväli puolestaan tarkoittaa vierekkäisten pikselien keskikohtien välistä etäisyyttä. Se mitataan myös mikrometreinä (µm). Pikseliväli on kääntäen verrannollinen kennon resoluutioon: pienempi pikseliväli tarkoittaa suurempaa resoluutiota ja päinvastoin.
Pienempi pikselikoko mahdollistaa suuremman pikselimäärän sijoittamisen tietylle pinta-alalle ja siten tehokkaan resoluution kasvattamisen.
Yhteenvetona voidaan todeta, että pikselikoko vaikuttaa herkkyyteen ja SNR-arvoon, kun taas pikseliväli vaikuttaa resoluutioon. Molemmat ovat tärkeitä ominaisuuksia kuvakennoa valittaessa, ja paras valinta riippuu sovelluksen vaatimuksista, kuten tarvittavasta resoluutiosta, herkkyydestä ja dynaamisesta alueesta.
Yleisesti ottaen, kun spatiaalinen resoluutio on tärkeämpää, tulisi valita pienempi pikselikoko. Kun taas herkkyys on kriittinen tekijä, suuremmat pikselit toimivat paremmin.
Huaris One -tuotteet on suunniteltu korkeaa herkkyyttä varten. Niiden pikselikoko on 5,2 mikrometriä. Sovelluksissa, joissa vaaditaan korkeampaa spatiaalista resoluutiota, Huaris Five on optimaalinen valinta 2,2 mikrometrin pikselikoollaan.
Detektorimatriisin optinen koko
Detektorimatriisin optinen koko on niin sanotun vapaan apertuurin parametri, eli se tarkoittaa valolle herkkää kokonaispinta-alaa. Yleisesti ottaen suurempi detektorimatriisin koko on toivottava, mutta suurempi koko merkitsee myös korkeampaa hintaa. Tästä syystä on tehtävä optimaalinen valinta.
Huaris One -laitteiden detektoripinta-ala on 6,656 mm × 5,325 mm, kun taas Huaris Five -laitteiden koko on 5,702 mm × 4,277 mm.
Lasersysteemeissä käytetään useita erilaisia liitäntästandardeja eri tarkoituksiin. Liitännän valinta riippuu sovelluksen vaatimuksista ja siirrettävien signaalien tyypistä. Yleisimpiä lasersysteemeissä käytettyjä liitäntästandardeja ovat:
USB (Universal Serial Bus): Laajasti käytetty standardi tiedon ja virran siirtoon laitteiden välillä. USB-liitäntöjä käytetään usein laserdiodeja ohjaavien ajurien, ohjainten ja muiden oheislaitteiden liittämiseen lasersysteemeihin.
USB-standardi määrittelee useita versioita, kuten 2, 3 ja 3.1. Keskeinen ero niiden välillä on siirtonopeus ja kaapelin enimmäispituus.
Ethernet: Verkkostandardi tiedonsiirtoon laitteiden välillä. Ethernet-liitäntöjä käytetään lasersysteemien liittämiseen verkkoon tai internetiin, mikä mahdollistaa etäohjauksen ja -valvonnan.
RS-232: Sarjaviestintästandardi tiedonsiirtoon laitteiden välillä. RS-232-liitäntöjä käytetään lasersysteemien liittämiseen ohjaimiin ja muihin oheislaitteisiin.
GPIB (General Purpose Interface Bus): Standardi elektronisten mittalaitteiden liittämiseen tietokoneisiin ja ohjaimiin. GPIB-liitäntöjä käytetään usein lasersysteemien yhteydessä.
HDMI (High-Definition Multimedia Interface): Digitaalinen rajapinta video- ja audiodatan siirtoon. HDMI-liitäntöjä käytetään lasersysteemien liittämiseen näyttöihin ja muihin videolaitteisiin.
Valokuituliittimet ovat myös yleisiä lasersysteemeissä suuritehoista tai suurinopeuksista tiedonsiirtoa varten, sillä ne tarjoavat suuren kaistanleveyden ja häiriönsietokyvyn sähkömagneettisia häiriöitä (EMI) vastaan.
Liitäntästandardin valinta riippuu sovelluksen vaatimuksista ja siirrettävien signaalien tyypistä. Jotkin detektorit voivat käyttää useita liitäntästandardeja eri signaalien siirtämiseen.
Lisäksi siirtostandardin valinta tulee tehdä laitteen suunnitteluvaiheessa siten, että se vastaa aikayksikössä siirrettävän datan määrää. Tästä syystä esimerkiksi USB 3 -standardin käyttö sovelluksessa, jossa datamäärä on pieni, ei ole optimaalinen ratkaisu.
Suljintyypit
Lasersysteemeissä suljin on laite, jota käytetään laserkeilan altistuksen hallintaan avaamalla tai sulkemalla keilan kulkureitti. Lasersysteemeissä käytetään useita erilaisia suljintyyppejä, joilla kaikilla on omat etunsa ja haittansa. Yleisimpiä suljintyyppejä ovat:
Mekaaniset sulkimet
Näissä sulkimissa käytetään mekaanisia osia, kuten terää tai kalvoa, estämään tai sallimaan laserkeilan kulku. Mekaaniset sulkimet ovat yleensä luotettavia ja kestäviä sekä soveltuvat suuritehoisille laserkeiloille, mutta ne voivat olla suhteellisen hitaita ja aiheuttaa tärinää.
Akusto-optiset sulkimet
Näissä sulkimissa hyödynnetään akusto-optiikkaa, jossa akustinen aalto ohjaa tai hajottaa laserkeilan. Ne ovat nopeita ja erittäin tarkkoja sekä soveltuvat suuritehoisille laserkeiloille, mutta ovat suhteellisen kalliita ja herkkiä lämpötilan vaihteluille.
Elektro-optiset sulkimet
Näissä sulkimissa sähkökenttä muuttaa materiaalin taitekerrointa ja siten laserkeilan kulkua. Ne ovat nopeita ja tarkkoja sekä soveltuvat suuritehoisille keiloille, mutta ovat kalliita ja herkkiä lämpötilalle.
AOM (Acousto-Optical Modulator)
Tämä suljintyyppi moduloi laserkeilan intensiteettiä akusto-optiikan avulla. AOM:t ovat nopeita ja tarkkoja sekä kestävät suuritehoisia keiloja, mutta ovat myös kalliita ja herkkiä lämpötilan muutoksille.
Pockels-solut
Näissä käytetään Pockels-ilmiötä, jossa sähkökenttä muuttaa kiteen taitekerrointa ja siten laserkeilan läpäisyä. Pockels-solut ovat nopeita ja tarkkoja sekä soveltuvat suuritehoisille laserkeiloille, mutta ovat kalliita ja herkkiä lämpötilan vaihteluille.
Suljintyypin valinta riippuu sovelluksen vaatimuksista, kuten laserkeilan tehosta, toistotaajuudesta, nopeudesta ja tarkkuudesta. Myös käyttöympäristö, kuten lämpötila-alue ja tärinä, tulee ottaa huomioon.
Termiä ”suljin” käytetään myös detektorimatriisien lukutilasta. ”Globaali suljin” tarkoittaa menetelmää, jossa koko matriisi tallentaa kuvan samanaikaisesti ja siirtää sen kerralla käsittelyelektroniikalle. ”Vierivä suljin” tarkoittaa puolestaan tilannetta, jossa kuvan osia siirretään elektroniikalle vaiheittain. Globaali suljin on suositeltava ratkaisu pienemmille matriiseille ja sovelluksiin, joissa havaitaan erittäin nopeita ilmiöitä. Vierivää suljinta käytetään suuremmissa matriiseissa ja tilanteissa, joissa kuva ei muutu nopeasti, sillä se mahdollistaa suuremmat tiedonsiirrot.