Hvilken type kamera er best for karakterisering av laserstråler – CMOS vs. CCD
Le profilage de faisceau laser est une étape essentielle de la recherche, du développement et de la production laser, car il fournit des informations critiques sur la qualité et les performances des faisceaux laser. L’un des éléments clés d’un profileur de faisceau laser est la caméra utilisée pour capturer les images du faisceau. Cependant, toutes les caméras ne se valent pas en matière de caractérisation des faisceaux laser. Dans cet article, nous passerons en revue les différents types de caméras disponibles pour le profilage de faisceau laser et aborderons les principaux critères à prendre en compte lors du choix d’une caméra adaptée à vos besoins de caractérisation. En comprenant les avantages et les limites de chaque type de caméra, vous pourrez faire un choix éclairé et garantir des résultats précis et fiables pour votre système de profilage de faisceau laser.
Lors de la caractérisation des faisceaux laser, plusieurs types de caméras peuvent être utilisés, chacun ayant ses propres avantages et inconvénients. Parmi les types de caméras les plus couramment utilisés pour la caractérisation des faisceaux laser, on trouve :
Caméras CCD (Charge-Coupled Device) : Ces caméras utilisent un capteur CCD pour capturer les images. Les caméras CCD sont sensibles à une large gamme de longueurs d’onde et permettent d’obtenir des images à haute résolution. Elles offrent également un faible bruit, une large plage dynamique et une bonne restitution des couleurs. Les caméras CCD sont couramment utilisées pour le profilage de faisceau laser et d’autres applications de caractérisation de faisceau.
Caméras CMOS (Complementary Metal-Oxide-Semiconductor) : Ces caméras utilisent un capteur CMOS pour capturer les images. Les caméras CMOS offrent des performances similaires à celles des caméras CCD, tout en étant plus économiques, consommant moins d’énergie et pouvant être intégrées dans des formats plus compacts. Elles sont également adaptées à l’imagerie rapide et aux applications à grande vitesse.
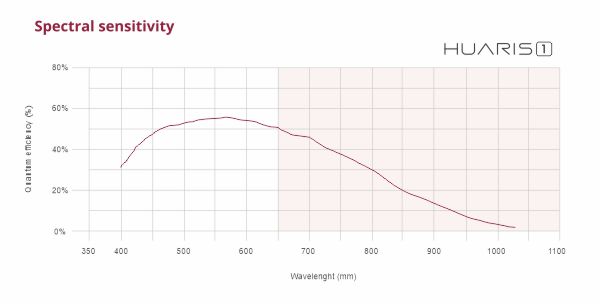
La courbe de sensibilité spectrale du profileur HUARIS ONE est présentée sur le graphique ci-dessous :
The spectral sensitivity curve of HUARIS ONE profiler
Caméras ICCD (Intensified Charge-Coupled Device) : Ces caméras combinent un capteur CCD et un intensificateur d’image. Les caméras ICCD sont très sensibles en conditions de faible luminosité et peuvent être utilisées pour capturer des images de faisceaux laser de très forte puissance. Elles sont couramment utilisées dans les applications laser de haute puissance, telles que la découpe et le soudage laser.
Caméras InGaAs : Ces caméras utilisent un capteur InGaAs, particulièrement sensible aux longueurs d’onde du proche infrarouge (NIR), une région fréquemment utilisée dans les applications laser. Elles sont adaptées à la mesure de faisceaux de forte puissance dans le domaine NIR et sont couramment utilisées dans les télécommunications par fibre optique, la spectroscopie et d’autres applications connexes.
Caméras SWIR (infrarouge à ondes courtes) : Ces caméras sont sensibles aux longueurs d’onde de l’infrarouge à ondes courtes (SWIR), également courantes dans les applications laser. Elles sont utilisées pour la mesure de faisceaux de forte puissance dans le domaine SWIR et sont largement employées dans les applications de détection et d’imagerie.
La meilleure caméra pour la caractérisation d’un faisceau laser dépend des exigences spécifiques de l’application, telles que la longueur d’onde, la puissance et la résolution spatiale du faisceau, ainsi que de l’environnement d’utilisation. Il est également important de prendre en compte des facteurs tels que le coût, la taille et la facilité d’utilisation lors du choix d’une caméra.
CMOS vs CCD – quelle est la meilleure option ?
Les capteurs CMOS (Complementary Metal-Oxide-Semiconductor) et CCD (Charge-Coupled Device) sont deux types de capteurs d’image utilisés dans les caméras, y compris celles destinées à la caractérisation des faisceaux laser. Chacun présente des avantages et des limites, et le choix dépend des exigences spécifiques de l’application.
Les capteurs CCD sont réputés pour leur haute qualité d’image et leur faible niveau de bruit. Ils sont sensibles à une large plage de longueurs d’onde et permettent d’obtenir des images à haute résolution. Les CCD offrent également une large plage dynamique et une bonne restitution des couleurs. Ils sont couramment utilisés dans les applications scientifiques et industrielles nécessitant une qualité d’image élevée. En revanche, les capteurs CCD sont généralement plus coûteux et consomment plus d’énergie que les capteurs CMOS.
Les capteurs CMOS, quant à eux, sont plus économiques et consomment moins d’énergie. Ils peuvent être intégrés dans des formats plus compacts, ce qui les rend adaptés aux applications portables ou à espace réduit. Ils sont également performants pour l’imagerie rapide et les applications à haute vitesse. Leur technologie permet une intégration accrue sur la puce, comme l’ajout d’unités de traitement réduisant le besoin de composants externes. Toutefois, les capteurs CMOS peuvent présenter un niveau de bruit plus élevé et une efficacité quantique (QE) inférieure à celle des CCD, nécessitant parfois un traitement supplémentaire pour atteindre une qualité d’image comparable.
En résumé, les CCD sont mieux adaptés aux applications nécessitant une qualité d’image élevée, tandis que les capteurs CMOS conviennent davantage aux applications sensibles aux coûts, à faible consommation d’énergie ou nécessitant un format compact.
Dans les applications laser, on considère généralement que les matrices CMOS présentent un seuil de dommage plus élevé que les CCD.
Il convient de noter que le choix entre CMOS et CCD n’est pas toujours évident et doit tenir compte des exigences spécifiques de l’application, telles que la longueur d’onde, la puissance, la résolution spatiale et le débit de données, ainsi que des facteurs tels que le coût, la taille et la facilité d’utilisation.
Consultez les spécifications des profileurs de faisceau laser Huaris.
Lors du choix d’une matrice de détection pour la caractérisation des faisceaux laser, plusieurs options sont disponibles, notamment les matrices monochromes (noir et blanc) et les matrices couleur. Le choix dépend des exigences spécifiques de l’application.
Les matrices de détection monochromes sont sensibles de l’ultraviolet au visible jusqu’au proche infrarouge (NIR). Elles sont largement utilisées pour le profilage de faisceau laser et d’autres applications de caractérisation, car elles offrent une haute résolution spatiale et une bonne sensibilité. Elles sont moins sensibles à la lumière ambiante et plus adaptées à la détection du rayonnement laser.
Les matrices de détection couleur, en revanche, sont sensibles simultanément à plusieurs longueurs d’onde, généralement dans le spectre visible, et permettent de capturer des informations chromatiques. Elles sont utilisées lorsque l’information couleur est importante, par exemple en imagerie couleur, analyse de matériaux ou capteurs couleur. Elles peuvent fournir davantage d’informations sur le faisceau laser, mais sont plus sensibles à la lumière ambiante. De plus, leur résolution spatiale est inférieure, ce qui explique qu’elles soient rarement utilisées pour la caractérisation de faisceaux laser, où une cartographie précise de l’intensité est essentielle.
Le choix entre une matrice monochrome et une matrice couleur dépend des besoins de l’application. Si l’information couleur n’est pas nécessaire, une matrice monochrome offrira une meilleure sensibilité et résolution spatiale. Si l’information couleur est requise, une matrice couleur sera plus appropriée. L’environnement d’utilisation doit également être pris en compte, car les matrices couleur sont plus sensibles à la lumière ambiante.
Profondeur de couleur et convertisseur analogique-numérique
Dans le cas des matrices de détection couleur, la profondeur de couleur et le convertisseur analogique-numérique (ADC) de la caméra influencent la qualité globale de l’image et la précision des mesures du faisceau laser.
La profondeur de couleur, également appelée profondeur de bits, correspond au nombre de bits utilisés pour représenter la couleur de chaque pixel. Plus la profondeur de couleur est élevée, plus le nombre de couleurs représentables est important et plus la restitution des couleurs est précise. Une profondeur de couleur plus élevée permet également une plage dynamique plus large, c’est-à-dire une meilleure capacité à capturer différentes intensités lumineuses, ce qui améliore la précision des mesures du faisceau laser.
Le convertisseur analogique-numérique (ADC) est un circuit qui convertit le signal analogique du capteur en une image numérique. La résolution de l’ADC, exprimée en bits, détermine le nombre maximal de valeurs numériques produites. Une résolution ADC plus élevée se traduit par une plus grande profondeur de couleur et une meilleure plage dynamique.
Une profondeur de couleur et une résolution ADC élevées permettent une représentation plus précise des couleurs et des intensités, améliorant ainsi la précision des mesures du faisceau laser.
Il convient de noter que ces paramètres ne sont pas les seuls à influencer la qualité de l’image et la précision des mesures. La qualité du capteur, des optiques et de l’objectif joue également un rôle important.
Taille de pixel et pas de pixel – quelle est la différence ?
La taille de pixel et le pas de pixel sont deux caractéristiques liées mais distinctes des capteurs d’image utilisés pour la caractérisation des faisceaux laser.
La taille de pixel correspond à la dimension physique de chaque pixel individuel sur le capteur. Elle est généralement exprimée en micromètres (µm) et peut varier de quelques micromètres pour les capteurs haute résolution à plusieurs dizaines de micromètres pour les capteurs de plus faible résolution. Une taille de pixel plus grande permet à chaque pixel de collecter davantage de lumière, ce qui améliore la sensibilité et le rapport signal/bruit (SNR).
Le pas de pixel, quant à lui, désigne la distance entre les centres de deux pixels adjacents sur le capteur. Il est également exprimé en micromètres (µm). Le pas de pixel est inversement proportionnel à la résolution du capteur : un pas de pixel plus petit permet une résolution plus élevée, et inversement.
Une taille de pixel plus fine permet d’intégrer un plus grand nombre de pixels sur une surface donnée, augmentant ainsi la résolution effective de la matrice.
En résumé, la taille de pixel influence principalement la sensibilité et le SNR, tandis que le pas de pixel détermine la résolution du capteur. Ces deux paramètres doivent être pris en compte lors du choix d’un capteur en fonction des besoins de l’application, notamment en termes de résolution, de sensibilité et de plage dynamique.
De manière générale, lorsque la résolution spatiale est prioritaire, il est préférable de choisir des pixels plus petits. En revanche, lorsque la sensibilité est critique, des pixels plus grands offrent de meilleures performances.
Les produits Huaris One sont conçus pour offrir une sensibilité élevée, avec une taille de pixel de 5,2 microns. Pour les applications nécessitant une résolution spatiale plus élevée, les Huaris Five constituent un choix optimal avec une taille de pixel de 2,2 microns.
Taille optique de la matrice de détection
La taille optique d’une matrice de détection correspond à l’ouverture utile (clear aperture), c’est-à-dire à la surface totale du capteur sensible à la lumière. En règle générale, une plus grande taille de détecteur est souhaitable, mais elle entraîne également un coût plus élevé. Il est donc nécessaire de trouver un compromis optimal.
Les Huaris One disposent d’une surface de détection de 6,656 mm × 5,325 mm, tandis que les Huaris Five offrent une surface de 5,702 mm × 4,277 mm.
Dans les systèmes laser, plusieurs types de connecteurs sont couramment utilisés selon les besoins de transmission de données et de signaux. Le choix de la norme de connecteur dépend des exigences spécifiques de l’application.
USB (Universal Serial Bus) : Norme largement utilisée pour la transmission de données et d’alimentation entre les appareils. Les connecteurs USB sont couramment employés pour relier les pilotes de diodes laser, les contrôleurs et d’autres périphériques aux systèmes laser.
La norme USB comprend différentes versions (2, 3, 3.1, etc.), dont les principales différences concernent la vitesse de transmission et la longueur maximale du câble.
Ethernet : Norme réseau utilisée pour transmettre des données entre des appareils. Les connecteurs Ethernet permettent de connecter les systèmes laser à un réseau ou à Internet pour le contrôle et la surveillance à distance.
RS-232 : Norme de communication série utilisée pour la transmission de données entre appareils. Elle est souvent utilisée pour connecter les systèmes laser à des contrôleurs ou à d’autres périphériques.
GPIB (General Purpose Interface Bus) : Norme destinée à la connexion d’instruments électroniques à des ordinateurs et contrôleurs, couramment utilisée dans les environnements de mesure et de test.
HDMI (High-Definition Multimedia Interface) : Interface numérique utilisée pour la transmission de données audio et vidéo, notamment pour connecter des systèmes laser à des écrans.
Les connecteurs à fibre optique sont également utilisés dans les systèmes laser pour la transmission de données à haute puissance ou à grande vitesse, offrant une large bande passante et une immunité aux interférences électromagnétiques.
Le choix de la norme de transmission doit être effectué dès la phase de conception de l’appareil afin de correspondre au volume de données à transmettre dans un laps de temps donné. Par exemple, l’utilisation de l’USB 3 dans une application à faible débit de données constitue un choix non optimal.
Type d’obturateur
Dans les systèmes laser, un obturateur est un dispositif permettant de contrôler l’exposition du faisceau laser en ouvrant ou fermant le trajet du faisceau. Il existe plusieurs types d’obturateurs, chacun présentant des avantages et des inconvénients.
Obturateurs mécaniques
Ils utilisent des éléments mécaniques, tels qu’une lame ou un diaphragme, pour bloquer ou laisser passer le faisceau laser. Ils sont robustes et capables de supporter des faisceaux de forte puissance, mais leur vitesse d’ouverture et de fermeture est limitée et ils peuvent introduire des vibrations.
Obturateurs acousto-optiques
Ils reposent sur l’utilisation d’ondes acoustiques pour dévier ou diffuser le faisceau laser. Ils sont rapides, précis et adaptés aux fortes puissances, mais relativement coûteux et sensibles aux variations de température.
Obturateurs électro-optiques
Ils utilisent un champ électrique pour modifier l’indice de réfraction d’un matériau et contrôler le passage du faisceau. Ils offrent une grande rapidité et précision, mais sont également coûteux et sensibles aux variations thermiques.
AOM (modulateur acousto-optique)
Ce dispositif module l’intensité du faisceau laser au lieu de le bloquer ou de le dévier. Les AOM sont rapides, précis et adaptés aux fortes puissances, mais restent coûteux et sensibles à la température.
Cellules de Pockels
Elles exploitent l’effet Pockels, dans lequel un champ électrique appliqué à un cristal modifie son indice de réfraction, modulant ainsi la transmission du faisceau. Elles sont rapides, précises et adaptées aux lasers de forte puissance, mais coûteuses et sensibles aux variations de température.
Le choix de l’obturateur dépend des exigences spécifiques de l’application, telles que la puissance du faisceau, la cadence de répétition, la vitesse et la précision requises, ainsi que des conditions environnementales comme la température et les vibrations.
Le terme « obturateur » est également utilisé pour désigner le mode de lecture des matrices de détection. L’obturateur global capture l’image sur l’ensemble de la matrice simultanément, puis la transfère en une seule fois vers l’électronique de traitement. À l’inverse, l’obturateur roulant transfère l’image par portions successives. L’obturateur global est privilégié pour les matrices de petite taille et les phénomènes très rapides, tandis que l’obturateur roulant est utilisé pour les matrices plus grandes et les applications où l’image évolue lentement, afin de permettre un débit de données plus élevé.